




视觉引导螺母焊无序抓取

DexBrain


请填写以下信息,我们的专业顾问会尽快与您联系
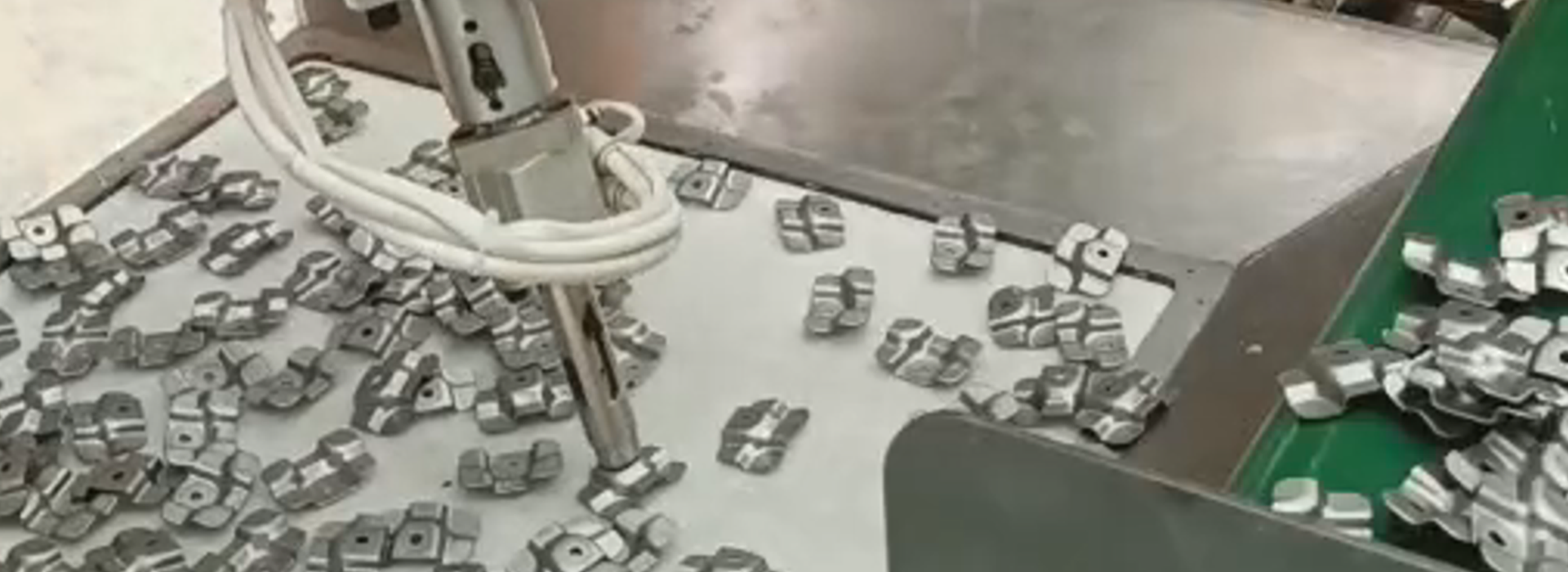
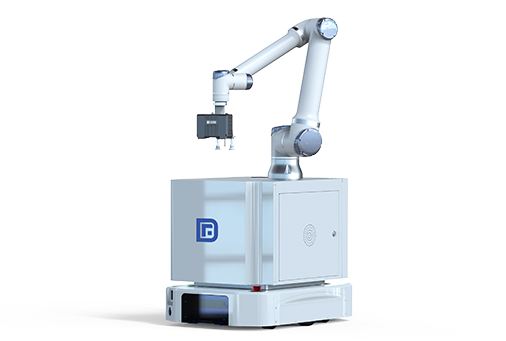
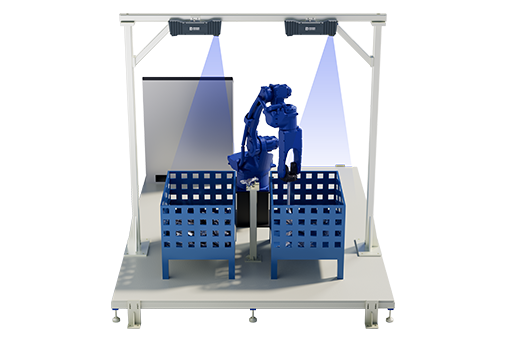
螺母自动焊接设备中,螺母的上料、定位和焊接工作大多是通过人工手持或者人工放到定位工装的方式实现,造成整个焊接效率低,生产成本高。跨维智能空间与具身智能套件依托 DexVerse™引擎,引导机器人对在载料台的四种规格的焊接件进行有序抓取放置,并将物料放置于指定位置完成上下料
⦁ 工件种类多,需频繁增产
⦁ 人工上料效率低,质量难以保证


Sim2Real 模型训练

先进视觉算法,精准定位

更高精度3D成像能力

成像感知一体化

工业级设计,应对实际场景挑战

极端工况算法开发
联系我们
公司总部:广东省深圳市南山区科园路1001号创投大厦14层
官方热线:4008086299
官方邮箱:contact@dexforce.com
求职招聘:HR@dexforce.top
融资对接:ir@dexforce.com









Copyright ◎ 2025 跨维(深圳)智能数字科技有限公司 DexForce Technology Co., Ltd. 粤ICP备20058782号-4

