






请填写以下信息,我们的专业顾问会尽快与您联系
取消
提交信息

DexBrain
请填写以下信息,我们的专业顾问会尽快与您联系

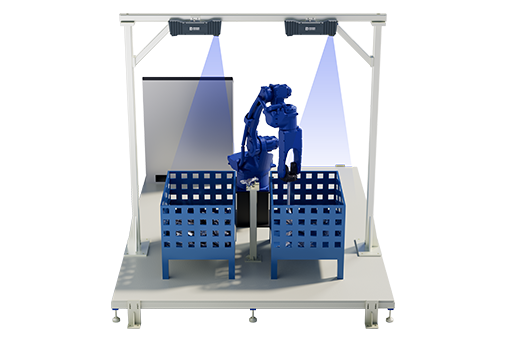
采用主动结构光技术,针对不同应用场景物体可输出高质量点云数据图,拍摄速度快、成像精细、方案成熟稳定,环境自适应性强产品
开源地址:https://open3dv.org/
Xema
Sparrow





XEMA-P
XEMA-LCW
XEMA-SCW
XEMA-DCW
SPARROW-D
SPARROW-SC

基于自研的高精度三维成像算法和 HDR 技术,在工作距离 600mm 时Z轴测量精度高达 50μm,可应用于对精度要求高的工业检测领域。

搭载 NVIDIA Jetson Nano 核心,内置运算和控制算法,赋予相机点云分析能力,优化成像质量;速度快,更稳定,可实现轻量、边端部署。

IP65 防尘防水设计;宽温设计,支持在 -10℃ 到 50℃ 的工作环境下工作,适应大多数工业场景;已通过了欧盟 CE、RoHS、美国 FCC 等认证,可更好应对潮湿、电磁干扰、粉尘等恶劣工业环境。

针对物体高反射表面专门优化的曝光模式,有效提升了相机在高反光表面测量中的精度和稳定性。独家开发补偿算法,能够有效降低深度测量误差,最小化物体表面纹理对深度图像的影响。
基于自研的高精度三维成像算法和 HDR 技术,在工作距离 600mm 时Z轴测量精度高达 50μm,可应用于对精度要求高的工业检测领域。
搭载 NVIDIA Jetson Nano 核心,内置运算和控制算法,赋予相机点云分析能力,优化成像质量;速度快,更稳定,可实现轻量、边端部署。
IP65 防尘防水设计;宽温设计,支持在 -10℃ 到 50℃ 的工作环境下工作,适应大多数工业场景;已通过了欧盟 CE、RoHS、美国 FCC 等认证,可更好应对潮湿、电磁干扰、粉尘等恶劣工业环境。
针对物体高反射表面专门优化的曝光模式,有效提升了相机在高反光表面测量中的精度和稳定性。独家开发补偿算法,能够有效降低深度测量误差,最小化物体表面纹理对深度图像的影响。
基于自研的高精度三维成像算法和 HDR 技术,在工作距离 600mm 时Z轴测量精度高达 50μm,可应用于对精度要求高的工业检测领域。
搭载 NVIDIA Jetson Nano 核心,内置运算和控制算法,赋予相机点云分析能力,优化成像质量;速度快,更稳定,可实现轻量、边端部署。
IP65 防尘防水设计;宽温设计,支持在 -10℃ 到 50℃ 的工作环境下工作,适应大多数工业场景;已通过了欧盟 CE、RoHS、美国 FCC 等认证,可更好应对潮湿、电磁干扰、粉尘等恶劣工业环境。
针对物体高反射表面专门优化的曝光模式,有效提升了相机在高反光表面测量中的精度和稳定性。独家开发补偿算法,能够有效降低深度测量误差,最小化物体表面纹理对深度图像的影响。
基于自研的高精度三维成像算法和 HDR 技术,在工作距离 600mm 时Z轴测量精度高达 50μm,可应用于对精度要求高的工业检测领域。
搭载 NVIDIA Jetson Nano 核心,内置运算和控制算法,赋予相机点云分析能力,优化成像质量;速度快,更稳定,可实现轻量、边端部署。
IP65 防尘防水设计;宽温设计,支持在 -10℃ 到 50℃ 的工作环境下工作,适应大多数工业场景;已通过了欧盟 CE、RoHS、美国 FCC 等认证,可更好应对潮湿、电磁干扰、粉尘等恶劣工业环境。
针对物体高反射表面专门优化的曝光模式,有效提升了相机在高反光表面测量中的精度和稳定性。独家开发补偿算法,能够有效降低深度测量误差,最小化物体表面纹理对深度图像的影响。

搭载定制化高速图像传感器与 AI 优化算法,SPARROW 相机实现 0.2 秒极速成像,像素级还原细节纹理,为自动化产线与智能终端提供毫秒级响应的超高清图像采集方案

针对物体高反射表面专门优化的曝光模式,有效提升了相机在高反光表面测量中的精度和稳定性。独家开发补偿算法,能够有效降低深度测量误差,最小化物体表面纹理对深度图像的影响

机身尺寸缩小 30%、重量减轻 40%,采用模块化架构与低功耗芯片,适配各类嵌入式系统与移动设备
搭载定制化高速图像传感器与 AI 优化算法,SPARROW 相机实现 0.2 秒极速成像,像素级还原细节纹理,为自动化产线与智能终端提供毫秒级响应的超高清图像采集方案
针对物体高反射表面专门优化的曝光模式,有效提升了相机在高反光表面测量中的精度和稳定性。独家开发补偿算法,能够有效降低深度测量误差,最小化物体表面纹理对深度图像的影响
机身尺寸缩小 30%、重量减轻 40%,采用模块化架构与低功耗芯片,适配各类嵌入式系统与移动设备
电路板
反光金属件
复杂汽车零配件
随意堆放包裹
|
|
|
|
|
| ||
| XEMA-P | XEMA-DCW | XEMA-SCW | XEMA-LCW | SPARROW-D | SPARROW-SC | ||
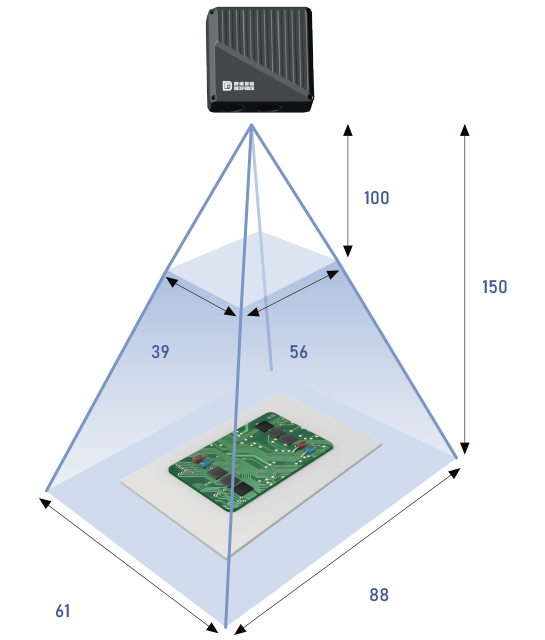
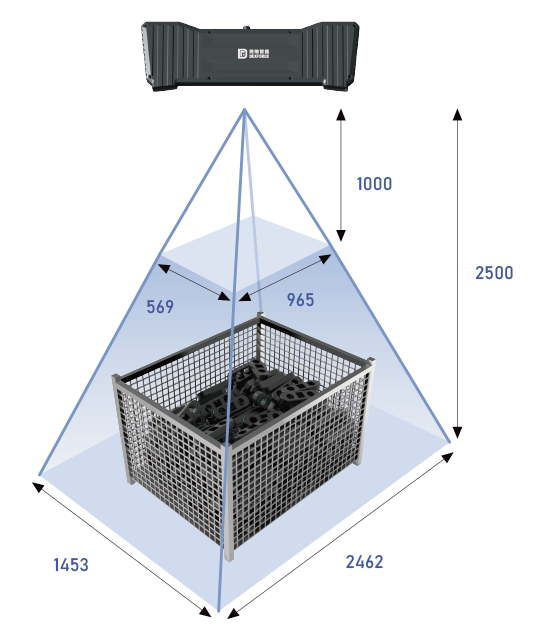
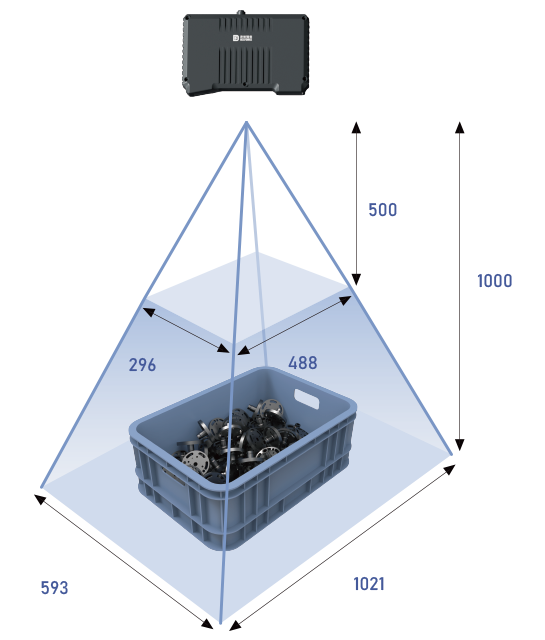
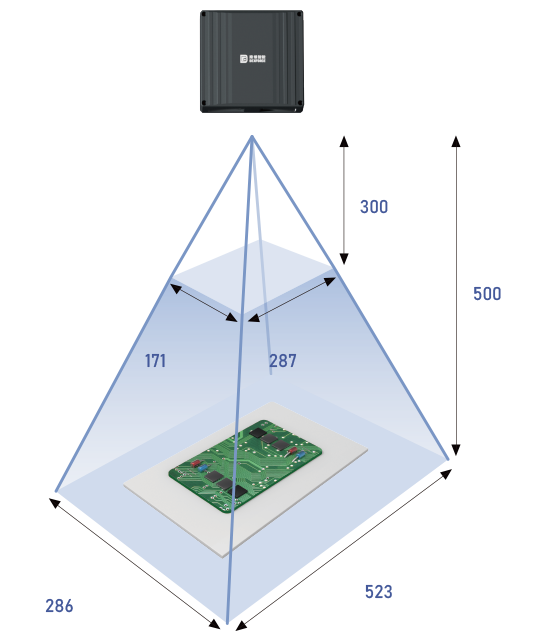
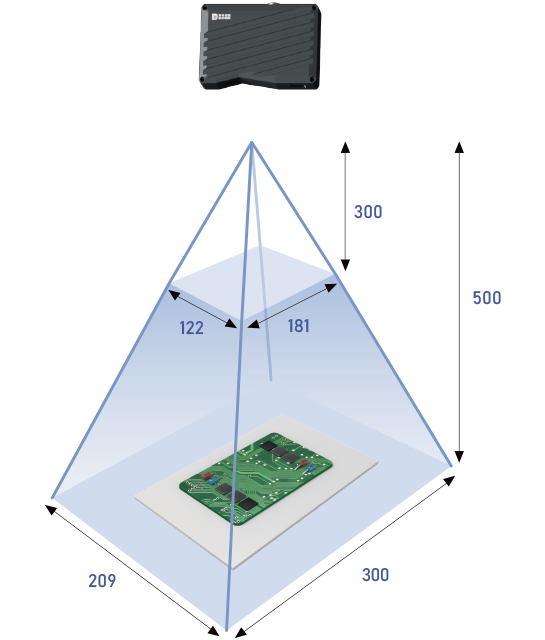
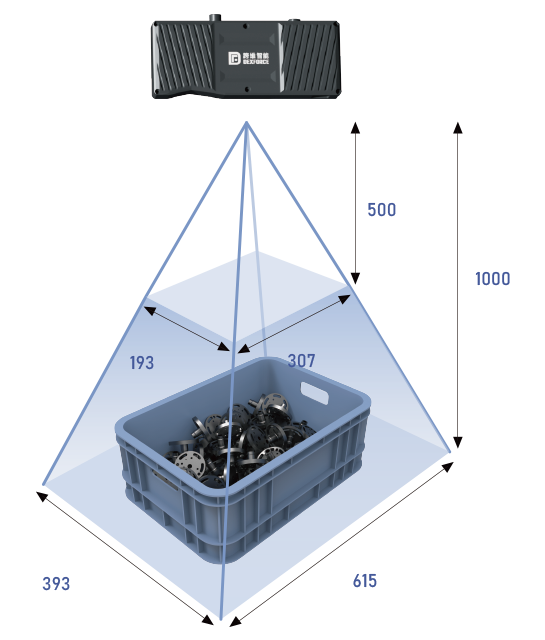
| 技术参数 | 近端视场(mm) | 56×39 | 287×171 | 488×296 | 965×569 | 181×122 | 307×193 |
| 远端视场(mm) | 88×61 | 523×286 | 1021×593 | 2462×1453 | 300×209 | 615×393 | |
| 推荐工作距离(mm) | 100-150 | 300-500 | 500-1000 | 1000-2500 | 300-500 | 500-1000 | |
| Z轴精度 | 6μm@0.1m | 0.03mm@0.4m | 0.05mm@0.8m | 0.50mm@2.5m | 0.05mm@0.4m | 0.05mm@0.6m | |
| Z轴重复精度σ(μm) | 1@0.10-0.15m | 21@0.3-0.5m | 41@0.5-1.0m | 80@1.0-2.5m | 18@03-0.5m | / | |
| 像素间距 | 22μm@0.10m 33μm@0.15m | 0.16mm@03m 0.27mm@0.5m | 0.27mm@0.5m 0.55mm@1.0m | 0.55mm@1.0m 1.37mm@2.5m | 0.13mm@0.3m 0.21mm@0.5m | 0.2mm@0.5m 0.4mm@1m | |
| 典型采集时间(s) | 1.0-2.0 | 0.5-1.5 | 0.5-1.5 | 0.5-1.5 | 0.4-1.0 | 0.4-1.0 | |
| 输出数据 | 点云图、深度图、 灰度图 | 点云图、深度图、 彩色图 | 点云图、深度图、 彩色图 | 点云图、深度图、 彩色图 | 点云图、深度图、 灰度图 | 点云图、深度图、 灰度图(彩色图) | |
| 操作系统支持 | Windows、Linux (Ubuntu20.04) | Windows、Linux (Ubuntu20.04) | Windows、Linux (Ubuntu20.04) | Windows、Linux (Ubuntu20.04) | Windows (CUDA>=11.0) | Windows (CUDA>=11.0) | |
| SDK接口 | C/C++/C#/python | C/C++/C#/python | C/C++/C#/python | C/C++/C#/python | C/C++/C#/python | C/C++/C#/python | |
| 硬件参数 | 视场角(H/V) | 35°/26° | 58°/33° | 58°/35° | 50°/33° | 33°/23° | 34°/22° |
| 外形尺寸(mm) | 126×146×61 | 119X127×58 | 207×128×46 | 433×133×45 | 130×90×37 | 226×90×38 | |
| 重量(kg) | 1.10 | 0.80 | 1.30 | 1.80 | 0.46 | 0.70 | |
| 基线长度(mm) | 70 | 80 | 145 | 350 | 75 | 170 | |
| 分辨率(px) | 2448×2048 | 1920×1200 | 1920×1200 | 1920×1200 | 1440×1080 | 1440×1080 | |
| 接口类型 | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | |
| 计算单元 | NVIDIA Jetson nano | NVIDIA Jetson nano | NVIDIA Jetson nano | NVIDIA Jetson nano | / | / | |
| 额定电压 | DC 24V 3.2A | DC 24V 3.2A | DC 24V 3.2A | DC 24V 3.2A | DC 12V 6.3A | DC 12V 6.3A | |
| 工作温度 | -20~50°C | -20~40°C | -20~40°C | -20~40°C | -10~40°C | -10~40°C | |
| 认证 | CE/FCC/RoHS | CE/FCC/RoHS | CE/FCC/RoHS | CE/FCC/RoHS | CE/FCC/RoHS | / | |
| 防护等级 | IP6X | IP65 | IP65 | IP65 | IP65 | IP65 | |

联系我们
公司总部:广东省深圳市南山区科园路1001号创投大厦14层
官方热线:4008086299
官方邮箱:contact@dexforce.com
求职招聘:HR@dexforce.top
融资对接:ir@dexforce.com









Copyright ◎ 2025 跨维(深圳)智能数字科技有限公司 DexForce Technology Co., Ltd. 粤ICP备20058782号-4








